 oder auch
oder auch
 oder auch
oder auch
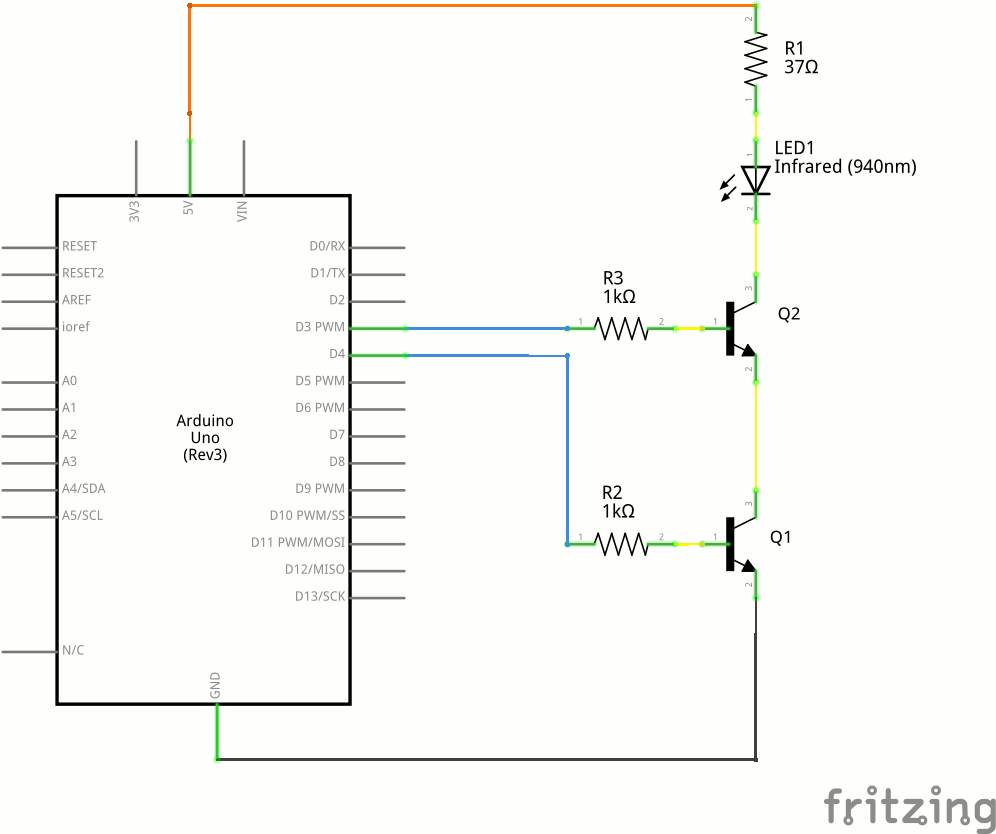
Mit dieser Erkenntnis kann nun ein Programm erstellt werden, das diese Signale ausgibt.
01010101010101010101010101010101010-01010101010101010101010101010101010---- A
10100101010101010101010101010101010-10100101010101010101010101010101010---- 1
01011010010101010101010101010101010-01011010010101010101010101010101010---- 2
01010101101001010101010101010101010-01010101101001010101010101010101010---- 3
01010101010110100101010101010101010-01010101010110100101010101010101010---- 4
01010101010101011010010101010101010-01010101010101011010010101010101010---- 5
10100101010101010101010110101010010-10100101010101010101010110101010010---- up
01011010010101010101010101011010101-01011010010101010101010101011010101---- down
10100101101001010101010101010101101-10100101101001010101010101010101101---- +
10101010010110100101010101010101010-10101010010110100101010101010101010---- -
01011010101001011010010101010101010-01011010101001011010010101010101010---- stop
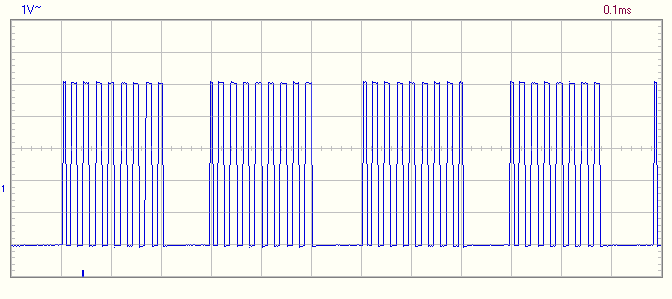
| void setup()
{ pinMode(2, OUTPUT); } void loop() { tone(2, 40000); delayMicroseconds(77); noTone(2); delayMicroseconds(33); } |

| void setup()
{ pinMode(2, OUTPUT); } void loop() { digitalWrite(2, HIGH); delayMicroseconds(77); digitalWrite(2, LOW); delayMicroseconds(33); } |
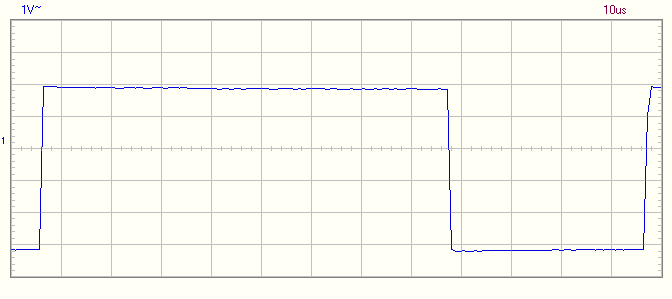
| void setup()
{ pinMode(2, OUTPUT); tone(4, 40000); } void loop() { digitalWrite(2, HIGH); delayMicroseconds(77); digitalWrite(2, LOW); delayMicroseconds(33); } |
 oder
auch
oder
auch 
 oder
auch
oder
auch 
| nächste Seite |